Add Case Files
This commit is contained in:
parent
778874cd1e
commit
18a87d8098
16 changed files with 729 additions and 0 deletions
case
14
case/README.md
Normal file
14
case/README.md
Normal file
|
|
@ -0,0 +1,14 @@
|
|||
# ATTMapper Case
|
||||
|
||||
The case uses 3 parts:
|
||||
|
||||
- The Inner Frame, holding the ATTNode, GPS and OLED Module
|
||||
- Front Cover
|
||||
- Back Cover
|
||||
|
||||
See pics/assembly* for some hints on how to assemble the frame part. This part is identical for both case variants.
|
||||
|
||||
Front and Back Cover exist in two variants:
|
||||
|
||||
- attmapper_battery_* for use with a small LiPo Battery (I use a 550mAH 20x35x8mm Cell)
|
||||
- attmapper_nobat_* for connecting a cable and mounting it in a car or similar with external power
|
||||
BIN
case/attmapper_battery_back.stl
Normal file
BIN
case/attmapper_battery_back.stl
Normal file
Binary file not shown.
BIN
case/attmapper_battery_front.stl
Normal file
BIN
case/attmapper_battery_front.stl
Normal file
Binary file not shown.
BIN
case/attmapper_frame.stl
Normal file
BIN
case/attmapper_frame.stl
Normal file
Binary file not shown.
BIN
case/attmapper_nobat_back.stl
Normal file
BIN
case/attmapper_nobat_back.stl
Normal file
Binary file not shown.
BIN
case/attmapper_nobat_front.stl
Normal file
BIN
case/attmapper_nobat_front.stl
Normal file
Binary file not shown.
80
case/openscad/attmapper.scad
Normal file
80
case/openscad/attmapper.scad
Normal file
|
|
@ -0,0 +1,80 @@
|
|||
use <libRoundedcube.scad>;
|
||||
|
||||
$boardw=30.4;
|
||||
$boardh=37.3;
|
||||
$oledw=27.62;
|
||||
$oledh=27.80;
|
||||
$gpsh=20.4;
|
||||
$gpsw=6.25;
|
||||
$walls=1.6;
|
||||
|
||||
$oledside=($boardw-$oledw)/2;
|
||||
|
||||
module frame() {
|
||||
union() {
|
||||
difference() {
|
||||
cube([$boardh+($walls*2),$boardw+($walls*2),11]);
|
||||
translate([$walls,$walls,-0.1]) cube([$boardh,$boardw,1.8]);
|
||||
translate([$walls+1,$walls+1,-0.1]) cube([$boardh-2,$boardw-2,8.2]);
|
||||
translate([$walls+1,$walls+$oledside,9.1]) cube([$oledh,$oledw, 2]);
|
||||
translate([$walls+4,$walls+$oledside,8]) cube([$oledh-6,$oledw, 4]);
|
||||
translate([$walls+1,$walls+$oledside+3,8]) cube([$oledh+2,$oledw-6, 4]);
|
||||
translate([$walls+$boardh-$gpsw,$walls+$boardw-$gpsh,1.6]) cube([$gpsw, $gpsh, 9]);
|
||||
translate([-2,$walls+5.1,-0.1]) cube([10,6.6,6.6]);
|
||||
translate([-0.1,$walls+$boardw-5.5,1.6]) cube([2.8,2,6.2]);
|
||||
translate([$boardh,$walls*2,4]) cube([5,5,3]);
|
||||
}
|
||||
difference() {
|
||||
translate([-3,$walls+$boardw-11,0.6]) cube([3,8.5,8]);
|
||||
translate([-3.1,$walls+$boardw-10.15,1.55]) cube([3.1,6.7,6.3]);
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
module front() {
|
||||
difference() {
|
||||
union() {
|
||||
roundedcube([$boardh+($walls*4)+24, $boardw+($walls*4), $walls+8], false, 2, "zmax", $fn=100);
|
||||
difference() {
|
||||
translate([$walls-1,$walls-1.05, -5]) roundedcube([$boardh+($walls*2)+26,$boardw+($walls*2)+2+0.1,5], false, 2, "zmin", $fn=100);
|
||||
translate([$walls,$walls-0.125, -5.1]) cube([$boardh+($walls*2)+24,$boardw+($walls*2)+0.25,5.1]);
|
||||
}
|
||||
}
|
||||
translate([$walls,$walls-0.125, -0.1]) cube([$boardh+($walls*2)+0.1,$boardw+($walls*2)+0.25,6]);
|
||||
translate([$walls,$walls+2, -0.1]) cube([$boardh+($walls*2)+24,$boardw+($walls*2)-4,6]);
|
||||
translate([($walls*2)+4.6,($walls*2)+$oledside,-0.1]) cube([$oledh-6,$oledw, 8]);
|
||||
translate([($walls*2)+10.6,($walls*2)+$oledside,-0.1]) cube([$oledh-13.5,$oledw, 10]);
|
||||
translate([($walls*2)+1.6,($walls*2)+$oledside+3,-0.1]) cube([$oledh,$oledw-6, 8]);
|
||||
translate([-0.1,$walls+$boardw-9.2,-5.36]) cube([3,8.5,9.6]);
|
||||
translate([-0.1,($walls*2)+9,-2.6]) rotate([0,90,0]) cylinder(5, 2.85, 2.85, $fn=100);
|
||||
translate([-0.5,($walls*2)+9-2.85,-2.6]) rotate([0,90,0]) cube([6, 2.85*2, 5]);
|
||||
translate([$boardh+25,$walls+2, 1.3]) union() {
|
||||
cube([5,20,4.6]);
|
||||
translate([2.8,5.8,0]) cube([10,8.5,3.6]);
|
||||
}
|
||||
translate([$boardh+24-($walls*2)-0.5,$boardw-5,2.1]) union() {
|
||||
translate([0,0,0]) cube([8.6,10,3.8]);
|
||||
translate([2,2.3,1]) cube([4.6,10,1.8]);
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
|
||||
module back() {
|
||||
difference() {
|
||||
roundedcube([$boardh+($walls*4)+24, $boardw+($walls*4), 11], false, 2, "zmin", $fn=100);
|
||||
translate([$walls-0.95,$walls-1.1, 5.4]) roundedcube([$boardh+($walls*2)+25.9,$boardw+($walls*2)+2,7.7], false, 2, "zmax", $fn=100);
|
||||
translate([$walls, ($walls*2)+1, 1.6]) cube([$boardh+($walls*3), $boardw-2, 9.4]);
|
||||
translate([$boardh+($walls*3), $walls-0.125, 1.6]) cube([24, $boardw+($walls*2)+0.25, 9.4]);
|
||||
translate([-0.5,($walls*2)+9,6.1]) rotate([0,90,0]) cylinder(5, 2.85, 2.85, $fn=100);
|
||||
translate([-0.5,($walls*2)+9-2.85,12]) rotate([0,90,0]) cube([6, 2.85*2, 5]);
|
||||
translate([-0.1,$walls+$boardw-9.3,6]) cube([3,9,9.6]);
|
||||
translate([28.5,3.6,-1]) cube([14,8.5,13]);
|
||||
|
||||
}
|
||||
}
|
||||
|
||||
// rotate([180,0,0]) front();
|
||||
back();
|
||||
|
||||
57
case/openscad/attmapper_nobat.scad
Normal file
57
case/openscad/attmapper_nobat.scad
Normal file
|
|
@ -0,0 +1,57 @@
|
|||
use <libRoundedcube.scad>;
|
||||
use <gopro_mounts.scad>;
|
||||
|
||||
$boardw=30.4;
|
||||
$boardh=37.3;
|
||||
$oledw=27.62;
|
||||
$oledh=27.80;
|
||||
$gpsh=20.4;
|
||||
$gpsw=6.25;
|
||||
$walls=1.6;
|
||||
$fn=100;
|
||||
|
||||
$oledside=($boardw-$oledw)/2;
|
||||
|
||||
module front() {
|
||||
difference() {
|
||||
union() {
|
||||
roundedcube([$boardh+($walls*4)+10, $boardw+($walls*4), $walls+8], false, 2, "zmax", $fn=100);
|
||||
difference() {
|
||||
translate([$walls-1,$walls-1.05, -5]) roundedcube([$boardh+($walls*2)+12,$boardw+($walls*2)+2+0.1,5], false, 2, "zmin", $fn=100);
|
||||
translate([$walls,$walls-0.125, -5.1]) cube([$boardh+($walls*2)+10,$boardw+($walls*2)+0.25,5.1]);
|
||||
}
|
||||
}
|
||||
translate([$walls,$walls-0.125, -0.1]) cube([$boardh+($walls*2)+0.1,$boardw+($walls*2)+0.25,6]);
|
||||
translate([$walls,$walls+2, -0.1]) cube([$boardh+($walls*2)+10,$boardw+($walls*2)-4,6]);
|
||||
translate([($walls*2)+4.6,($walls*2)+$oledside,-0.1]) cube([$oledh-6,$oledw, 8]);
|
||||
translate([($walls*2)+10.6,($walls*2)+$oledside,-0.1]) cube([$oledh-13.5,$oledw, 10]);
|
||||
translate([($walls*2)+1.6,($walls*2)+$oledside+3,-0.1]) cube([$oledh,$oledw-6, 8]);
|
||||
translate([-0.1,$walls+$boardw-9.2,-5.36]) cube([3,8.5,9.6]);
|
||||
translate([-0.1,($walls*2)+9,-2.6]) rotate([0,90,0]) cylinder(5, 2.85, 2.85, $fn=100);
|
||||
translate([-0.5,($walls*2)+9-2.85,-2.6]) rotate([0,90,0]) cube([6, 2.85*2, 5]);
|
||||
translate([$boardh+($walls*4)+5,($boardw+($walls*4))/2,3]) rotate([0,90,0]) cylinder(10, 2, 2, $fn=100);
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
|
||||
module back() {
|
||||
difference() {
|
||||
union() {
|
||||
roundedcube([$boardh+($walls*4)+10, $boardw+($walls*4), 11], false, 2, "zmin", $fn=100);
|
||||
rotate([90,0,0]) translate([$boardh+7, -11+3.4, -($boardw+($walls*4))/2]) gopro_connector("double");
|
||||
}
|
||||
translate([$walls-0.95,$walls-1.1, 5.4]) roundedcube([$boardh+($walls*2)+11.9,$boardw+($walls*2)+2,7.7], false, 2, "zmax", $fn=100);
|
||||
translate([$walls, ($walls*2)+1, 1.6]) cube([$boardh+($walls*3), $boardw-2, 9.4]);
|
||||
translate([$boardh+($walls*3), $walls-0.125, 3.2]) cube([10, $boardw+($walls*2)+0.25, 9.4]);
|
||||
translate([-0.5,($walls*2)+9,6.1]) rotate([0,90,0]) cylinder(5, 2.85, 2.85, $fn=100);
|
||||
translate([-0.5,($walls*2)+9-2.85,12]) rotate([0,90,0]) cube([6, 2.85*2, 5]);
|
||||
translate([-0.1,$walls+$boardw-9.3,6]) cube([3,9,9.6]);
|
||||
// translate([28.5,3.6,-1]) cube([14,8.5,13]); // Programming Port
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
translate([0,-10,9.6]) rotate([180,0,0]) front();
|
||||
// rotate([180,0,0]) back();
|
||||
|
||||
520
case/openscad/gopro_mounts.scad
Normal file
520
case/openscad/gopro_mounts.scad
Normal file
|
|
@ -0,0 +1,520 @@
|
|||
|
||||
/* [Main] */
|
||||
|
||||
// First head kind ("example" show them all but is not printable)
|
||||
gopro_primary="example"; // [example,triple,double]
|
||||
// The other head kind (only for the triple or double primary kind)
|
||||
gopro_secondary_what="triple"; // [double,triple,rod,clamp,none]
|
||||
// If ever you rotate the seconday head you will probably need to enable support to print it
|
||||
gopro_secondary_rotated=0; // [0:false,1:true]
|
||||
|
||||
// Optional axis-to-axis extension rod (hence, it cannot be less than 20.7)
|
||||
gopro_ext_len=50;
|
||||
// The wall thickness of the extension rod (2 to 6mm are good values)
|
||||
gopro_ext_th=3;
|
||||
|
||||
/* [Rod and captive nut] */
|
||||
|
||||
// This tab is useful only if you have selected "rod" as the secondary head. The optional rod diameter (also the captive nut internal diameter)
|
||||
gopro_captive_rod_id= 3.8;
|
||||
// The angle the rod makes with the axis (0 is colinear, 90 is a right angle)
|
||||
gopro_captive_rod_angle= 45; // [0:90]
|
||||
// Optional captive nut thickness with freeplay (tightest would be 3.2)
|
||||
gopro_rod_nut_th= 3.6;
|
||||
// Optional captive nut diameter with freeplay (from corner to corner)
|
||||
gopro_rod_nut_od= 8.05;
|
||||
// How much is the protruding output of the rod on the rod attachment (can be zero), useful if you don't want a captive nut with still a tight coupling
|
||||
gopro_captive_protruding_h= 0.5;
|
||||
|
||||
/* [Clamp/bar mount] */
|
||||
|
||||
// This tab is useful only if you have selected "clamp" as the secondary head. The optional (handle)bar diameter
|
||||
gopro_bar_rod_d= 31;
|
||||
// How thick is the ring around the bar
|
||||
gopro_bar_th= 3.2;
|
||||
// How big is the gap between the jaws
|
||||
gopro_bar_gap= 2.4;
|
||||
// The jaw screw diameter
|
||||
gopro_bar_screw_d= 3;
|
||||
// The diameter of the head of the screw
|
||||
gopro_bar_screw_head_d= 6.2;
|
||||
// The diameter of the nut of the screw from corner to corner (can be zero)
|
||||
gopro_bar_screw_nut_d= 6.01;
|
||||
// How thick are the shoulders on which to bolt (each side)
|
||||
gopro_bar_screw_shoulder_th=4.5;
|
||||
// Whether to reverse the bolt orientation (from which side you will screw the bolt, defaut is from the joint)
|
||||
gopro_bar_screw_reversed=false; // [true,false]
|
||||
|
||||
/* [Hidden] */
|
||||
|
||||
// The gopro connector itself (you most probably do not want to change this but for the first two)
|
||||
|
||||
// The locking nut on the gopro mount triple arm mount (keep it tight)
|
||||
gopro_nut_d= 9.2;
|
||||
// How deep is this nut embossing (keep it small to avoid over-overhangs)
|
||||
gopro_nut_h= 2;
|
||||
// Hole diameter for the two-arm mount part
|
||||
gopro_holed_two= 5;
|
||||
// Hole diameter for the three-arm mount part
|
||||
gopro_holed_three= 5.5;
|
||||
// Thickness of the internal arm in the 3-arm mount part
|
||||
gopro_connector_th3_middle= 3.1;
|
||||
// Thickness of the side arms in the 3-arm mount part
|
||||
gopro_connector_th3_side= 2.7;
|
||||
// Thickness of the arms in the 2-arm mount part
|
||||
gopro_connector_th2= 3.04;
|
||||
// The gap in the 3-arm mount part for the two-arm
|
||||
gopro_connector_gap= 3.1;
|
||||
// How round are the 2 and 3-arm parts
|
||||
gopro_connector_roundness= 1;
|
||||
// How thick are the mount walls
|
||||
gopro_wall_th= 3;
|
||||
|
||||
gopro_connector_wall_tol=0.5+0;
|
||||
gopro_tol=0.04+0;
|
||||
|
||||
// Can be queried from the outside
|
||||
gopro_connector_z= 2*gopro_connector_th3_side+gopro_connector_th3_middle+2*gopro_connector_gap;
|
||||
gopro_connector_x= gopro_connector_z;
|
||||
gopro_connector_y= gopro_connector_z/2+gopro_wall_th;
|
||||
|
||||
///////////////////////////////////////////////////////////////////////
|
||||
//
|
||||
// GoPro Hero mount and joint (gopro_mounts_mooncactus.scad) - Rev 1.03
|
||||
//
|
||||
///////////////////////////////////////////////////////////////////////
|
||||
//
|
||||
// CC-BY-NC 2013 jeremie.francois@gmail.com
|
||||
// http://www.thingiverse.com/thing:62800
|
||||
// http://betterprinter.blogspot.com
|
||||
//
|
||||
|
||||
// It slices neatly on an ultimaker with the following parameters
|
||||
//
|
||||
// 0.1 mm layers (for better look & more compact FDM) -- 0.15 is still OK (and faster)
|
||||
// 0.8 mm walls (loops->infill->perimeters)
|
||||
// 0.8 mm bottom/top
|
||||
// 100% fill (probably safer, though 30% is quite OK)
|
||||
//
|
||||
// Rev 1.01: fixed printing angle vs captive nut slot, added a slight freeplay
|
||||
// Rev 1.02: added handle/bar mount and rounded the angles of the rod mount
|
||||
// Rec 1.03: examples and first release (20130317-1234)
|
||||
|
||||
/* ****************************************************************
|
||||
|
||||
HOW TO USE IN YOUR OWN DESIGNS
|
||||
|
||||
use <gopro_mounts_mooncactus.scad>
|
||||
|
||||
// Create a "triple" gopro connector
|
||||
gopro_connector("triple");
|
||||
|
||||
// Create a "triple" gopro connector without the locking nut shape
|
||||
translate([30,0,0])
|
||||
gopro_connector("triple", withnut=false);
|
||||
|
||||
// Create a "double" gopro connector
|
||||
translate([60,0,0])
|
||||
gopro_connector("double");
|
||||
|
||||
// Add a bar mount/clamp to one of the connector
|
||||
translate([90,0,0])
|
||||
gopro_bar_clamp(
|
||||
rod_d= 31, // rod diameter
|
||||
th= 3.2, // main thickness
|
||||
gap= 2.4, // space between the clamps
|
||||
screw_d= 3, // screw diameter
|
||||
screw_head_d= 6.2, // screw head diameter
|
||||
screw_nut_d= 6.01, // nut diameter from corner to corner
|
||||
screw_shoulder_th=4.5, // thickness of the shoulder on which the nut clamps
|
||||
screw_reversed=false // true to mirror the orientation of the clamp bolts
|
||||
);
|
||||
|
||||
// Extends a connector with a mount for a rod and an optional embedded nut
|
||||
translate([120,0,0])
|
||||
gopro_rod_connect(
|
||||
rod_id=3.8, // rod diameter
|
||||
angle=80, // rod angle (0 is straight, 90 is a right turn)
|
||||
nut_th=3.2, // embedded nut thickness (can be zero to disable the embedded nut)
|
||||
nut_od=7.9 // nut diameter from corner to corner
|
||||
);
|
||||
|
||||
// How to build a linear extruded bar extender
|
||||
translate([0,65,0])
|
||||
{
|
||||
gopro_connector("double");
|
||||
gopro_extended(len=50, th=3)
|
||||
scale([1,-1,1])
|
||||
gopro_connector("triple");
|
||||
}
|
||||
|
||||
// The following dimensions are useful to attach the mount to your design:
|
||||
gopro_connector_z= 14.7;
|
||||
gopro_connector_x= 14.7;
|
||||
gopro_connector_y= 10.35;
|
||||
|
||||
|
||||
// Finally, note that the arm are designed in a way which is not the best orientation to print: you would better rotate them with, eg. rotate([0,90,0])
|
||||
|
||||
**************************************************************** */
|
||||
|
||||
|
||||
|
||||
// To generate the sample set in bash, just copy/paste the following in a terminal:
|
||||
/*
|
||||
for kind in double triple; do
|
||||
for angle in 30 80; do
|
||||
through=true
|
||||
[[ $angle == 0 ]] && through=false
|
||||
openscad -D print_it=true -D gopro_primary="\"$kind\"" -D gopro_captive_rod_angle=$angle -o gmb_${kind}_${angle}.stl gopro_mount_bit.scad
|
||||
done
|
||||
openscad -D print_it=true -D gopro_primary="\"$kind\"" -D gopro_rod_nut_th=0 -o gmb_${kind}_simple.stl gopro_mount_bit.scad
|
||||
done
|
||||
*/
|
||||
|
||||
|
||||
//
|
||||
// ================ Full (colored) example (for openscad & command line)
|
||||
//
|
||||
gopro_ext_len_real= (gopro_ext_len > 2*gopro_connector_y ? gopro_ext_len : 0);
|
||||
if(gopro_primary=="example")
|
||||
{
|
||||
gopro_connector("triple", withnut=true);
|
||||
|
||||
color([1,0.2,0.2])
|
||||
gopro_bar_clamp(
|
||||
rod_d= gopro_bar_rod_d, th=gopro_bar_th, gap=gopro_bar_gap,
|
||||
screw_d= gopro_bar_screw_d, screw_head_d= gopro_bar_screw_head_d, screw_nut_d= gopro_bar_screw_nut_d, screw_shoulder_th= gopro_bar_screw_shoulder_th,
|
||||
screw_reversed= gopro_bar_screw_reversed );
|
||||
|
||||
rotate([0,180,130]) color([0.2,0.2,1])
|
||||
gopro_connector("double");
|
||||
|
||||
rotate([0,180,130]) color([0,0.8,0])
|
||||
gopro_rod_connect(nut_th=gopro_rod_nut_th, nut_od=gopro_rod_nut_od, rod_id=gopro_captive_rod_id, angle=gopro_captive_rod_angle);
|
||||
|
||||
translate([-35,-10,0]) color([0.6,0.6,0.6])
|
||||
rotate([0,0,10])
|
||||
{
|
||||
gopro_connector("double");
|
||||
gopro_extended(len=gopro_ext_len, th=gopro_ext_th)
|
||||
{
|
||||
scale([1,-1,1]) gopro_connector("triple");
|
||||
// or (eg.)
|
||||
// translate([0,-2*gopro_connector_y,0]) gopro_bar_clamp(rod_d= 20, th= 5, gap= 5, screw_d= 3, screw_head_d= 6.2, screw_nut_d= 6.01, screw_shoulder_th=4.5, screw_reversed=true);
|
||||
}
|
||||
}
|
||||
}
|
||||
else // useful blocks
|
||||
{
|
||||
//
|
||||
// ================ Printable standalone blocks (for the customizer)
|
||||
//
|
||||
rotate([0,90,0])
|
||||
{
|
||||
if(gopro_primary=="triple")
|
||||
gopro_connector("triple", withnut=true);
|
||||
else
|
||||
gopro_connector("double");
|
||||
|
||||
gopro_extended(len=gopro_ext_len_real, th=gopro_ext_th) {}
|
||||
translate([0,gopro_ext_len_real>0 ? gopro_ext_len_real-gopro_connector_y*2 : 0,0])
|
||||
{
|
||||
rotate([0,gopro_secondary_rotated?-90:0,0])
|
||||
if(gopro_secondary_what=="double" || gopro_secondary_what=="triple")
|
||||
{
|
||||
translate([0,gopro_connector_y*2,0])
|
||||
scale([1,-1,1])
|
||||
if(gopro_secondary_what=="triple")
|
||||
gopro_connector("triple", withnut=true);
|
||||
else if(gopro_secondary_what=="double")
|
||||
gopro_connector("double");
|
||||
}
|
||||
else if(gopro_secondary_what=="rod" && gopro_captive_rod_id>0) // Optional captive nut
|
||||
{
|
||||
gopro_rod_connect(nut_th=gopro_rod_nut_th, nut_od=gopro_rod_nut_od, rod_id=gopro_captive_rod_id, angle=gopro_captive_rod_angle);
|
||||
}
|
||||
else if(gopro_secondary_what=="clamp" && gopro_bar_rod_d>0) // Optional bar mount (can't be both!)
|
||||
{
|
||||
rotate([0,90,0])
|
||||
gopro_bar_clamp(
|
||||
rod_d= gopro_bar_rod_d,
|
||||
th= gopro_bar_th,
|
||||
gap= gopro_bar_gap,
|
||||
screw_d= gopro_bar_screw_d,
|
||||
screw_head_d= gopro_bar_screw_head_d,
|
||||
screw_nut_d= gopro_bar_screw_nut_d,
|
||||
screw_shoulder_th= gopro_bar_screw_shoulder_th,
|
||||
screw_reversed= gopro_bar_screw_reversed
|
||||
);
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
|
||||
//
|
||||
// ============================= GOPRO CONNECTOR =============================
|
||||
//
|
||||
|
||||
module gopro_torus(r,rnd)
|
||||
{
|
||||
translate([0,0,rnd/2])
|
||||
rotate_extrude(convexity= 10)
|
||||
translate([r-rnd/2, 0, 0])
|
||||
circle(r= rnd/2, $fs=0.2);
|
||||
}
|
||||
|
||||
module gopro_rcyl(r,h, centered, rnd=1)
|
||||
{
|
||||
translate([0,0,center ? -h/2 : 0])
|
||||
hull() {
|
||||
translate([0,0,0]) gopro_torus(r=r, rnd=rnd);
|
||||
translate([0,0,h-rnd]) gopro_torus(r=r, rnd=rnd);
|
||||
}
|
||||
}
|
||||
|
||||
module gopro_connector(version="double", withnut=true, captive_nut_th=0, captive_nut_od=0, captive_rod_id=0, captive_nut_angle=0)
|
||||
{
|
||||
module gopro_profile(th)
|
||||
{
|
||||
hull()
|
||||
{
|
||||
gopro_torus(r=gopro_connector_z/2, rnd=gopro_connector_roundness);
|
||||
translate([0,0,th-gopro_connector_roundness])
|
||||
gopro_torus(r=gopro_connector_z/2, rnd=gopro_connector_roundness);
|
||||
translate([-gopro_connector_z/2,gopro_connector_z/2,0])
|
||||
cube([gopro_connector_z,gopro_wall_th,th]);
|
||||
}
|
||||
}
|
||||
difference()
|
||||
{
|
||||
union()
|
||||
{
|
||||
if(version=="double")
|
||||
{
|
||||
for(mz=[-1:2:+1]) scale([1,1,mz])
|
||||
translate([0,0,gopro_connector_th3_middle/2 + (gopro_connector_gap-gopro_connector_th2)/2]) gopro_profile(gopro_connector_th2);
|
||||
}
|
||||
if(version=="triple")
|
||||
{
|
||||
translate([0,0,-gopro_connector_th3_middle/2]) gopro_profile(gopro_connector_th3_middle);
|
||||
for(mz=[-1:2:+1]) scale([1,1,mz])
|
||||
translate([0,0,gopro_connector_th3_middle/2 + gopro_connector_gap]) gopro_profile(gopro_connector_th3_side);
|
||||
}
|
||||
|
||||
// add the common wall
|
||||
translate([0,gopro_connector_z/2+gopro_wall_th/2+gopro_connector_wall_tol,0])
|
||||
cube([gopro_connector_z,gopro_wall_th,gopro_connector_z], center=true);
|
||||
|
||||
// add the optional nut emboss
|
||||
if(version=="triple" && withnut)
|
||||
{
|
||||
translate([0,0,gopro_connector_z/2-gopro_tol])
|
||||
difference()
|
||||
{
|
||||
cylinder(r1=gopro_connector_z/2-gopro_connector_roundness/2, r2=11.5/2, h=gopro_nut_h+gopro_tol);
|
||||
cylinder(r=gopro_nut_d/2, h=gopro_connector_z/2+3.5+gopro_tol, $fn=6);
|
||||
}
|
||||
}
|
||||
}
|
||||
// remove the axis
|
||||
translate([0,0,-gopro_tol])
|
||||
cylinder(r=(version=="double" ? gopro_holed_two : gopro_holed_three)/2, h=gopro_connector_z+4*gopro_tol, center=true, $fs=1);
|
||||
}
|
||||
}
|
||||
|
||||
//
|
||||
// ============================= CAPTIVE NUT/ROD =============================
|
||||
//
|
||||
|
||||
module gopro_rod_connect(nut_od, rod_id, nut_th, angle=0)
|
||||
{
|
||||
if( (nut_th>0 && nut_od>0) || rod_id>0 )
|
||||
translate([0,gopro_connector_z,0])
|
||||
{
|
||||
difference()
|
||||
{
|
||||
// Main body mass
|
||||
difference()
|
||||
{
|
||||
hull()
|
||||
{
|
||||
translate([0,-gopro_connector_z/2+gopro_wall_th,0]) // attachment
|
||||
cube([gopro_connector_z,gopro_tol,gopro_connector_z], center=true);
|
||||
|
||||
// main cylinder
|
||||
translate([gopro_connector_z/8,gopro_connector_z/4,0]) scale([0.75,0.5,1]) // optional
|
||||
gopro_rcyl(r=gopro_connector_z/2, h=gopro_connector_z, center=true, rnd=3);
|
||||
|
||||
// nozzle
|
||||
rotate([0,0,angle])
|
||||
translate([0,gopro_connector_z/2-gopro_tol,0])
|
||||
rotate([-90,0,0])
|
||||
{
|
||||
hull()
|
||||
{
|
||||
translate([0,0,-1.5]) gopro_torus(r=gopro_connector_z/2, rnd=1.5);
|
||||
translate([0,0,gopro_captive_protruding_h-1])
|
||||
gopro_torus(r=nut_od/2, rnd=1);
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// Captive nut slot
|
||||
if(nut_th>0 && nut_od>0)
|
||||
{
|
||||
translate([0,0,0])
|
||||
rotate([0,(angle<18)?180:0,angle]) // easier print only for small angles
|
||||
hull()
|
||||
{
|
||||
rotate([-90,0,0]) cylinder(r=nut_od/2, h=nut_th+2*gopro_tol, $fn=6, center=true);
|
||||
translate([gopro_connector_z,0,0])
|
||||
rotate([-90,0,0]) cylinder(r=nut_od/2, h=nut_th+2*gopro_tol, $fn=6, center=true);
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// Carve the rod void
|
||||
if(rod_id>0)
|
||||
{
|
||||
rotate([0,0,angle])
|
||||
{
|
||||
if(angle>=80 || angle<=-80)
|
||||
rotate([-90,30,0])
|
||||
cylinder(r=rod_id/2, h=gopro_connector_z+2*gopro_captive_protruding_h+2*gopro_tol, $fs=0.2, center=true);
|
||||
else
|
||||
translate([0,gopro_wall_th+gopro_tol*2-nut_th/2,0])
|
||||
rotate([-90,30,0])
|
||||
cylinder(r=rod_id/2, h=gopro_connector_z/2+gopro_captive_protruding_h+gopro_tol, $fs=0.2);
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
//
|
||||
// ============================= BAR CLAMP =============================
|
||||
//
|
||||
|
||||
module gopro_bar_clamp(
|
||||
rod_d= 31,
|
||||
th= 3.2,
|
||||
gap= 2.4,
|
||||
screw_d= 3,
|
||||
screw_head_d= 6.2,
|
||||
screw_nut_d= 6.01,
|
||||
screw_shoulder_th=4.5,
|
||||
screw_reversed=1
|
||||
)
|
||||
{
|
||||
module clamp_profile(r)
|
||||
{
|
||||
scale([r,r,1])
|
||||
translate([0,rod_d/2,0])
|
||||
cylinder(r=rod_d/2 + th,h=gopro_tol);
|
||||
}
|
||||
|
||||
screw_x= rod_d/2+screw_head_d/2;
|
||||
translate([0,gopro_connector_z,0])
|
||||
difference()
|
||||
{
|
||||
hull()
|
||||
{
|
||||
translate([0,-gopro_connector_z/2+gopro_wall_th,0]) // attachment
|
||||
cube([gopro_connector_z,gopro_tol,gopro_connector_z], center=true);
|
||||
|
||||
clamp_profile(1);
|
||||
for(m=[-1:2:+1]) scale([1,1,m])
|
||||
translate([0,0,-gopro_connector_z/2])
|
||||
clamp_profile((rod_d-0.8)/rod_d);
|
||||
|
||||
// Shoulder screw support
|
||||
for(m=[-1:2:+1]) scale([m,1,1])
|
||||
{
|
||||
translate([screw_x,rod_d/2,gopro_tol/2])
|
||||
rotate([90,0,0])
|
||||
translate([0,0,-(gap+th*2)/2])
|
||||
cylinder(r=screw_head_d/2+0.78,h=gap+th*2);
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
translate([0,rod_d/2,0])
|
||||
{
|
||||
// Main hole and gap
|
||||
translate([0,0,-gopro_tol-gopro_connector_z/2])
|
||||
cylinder(r=rod_d/2,h=gopro_connector_z+2*gopro_tol, $fs=1); // inner
|
||||
|
||||
// Gap
|
||||
cube([screw_x*2 + screw_head_d*2, gap, gopro_connector_z+2*gopro_tol+1],center=true);
|
||||
|
||||
// Screws
|
||||
for(mx=[-1:2:+1]) scale([mx,1,1])
|
||||
{
|
||||
translate([screw_x,0,0]) rotate([90,0,0])
|
||||
{
|
||||
translate([0,0,-rod_d/2-screw_shoulder_th]) cylinder(r=screw_d/2,h=rod_d+2*screw_shoulder_th,$fs=0.5); // screw axis
|
||||
if(screw_head_d>0)
|
||||
scale([1,1,screw_reversed?-1:1])
|
||||
translate([0,0,gap/2+screw_shoulder_th])
|
||||
cylinder(
|
||||
r1=screw_head_d/2,
|
||||
r2=1.5*screw_head_d/2,
|
||||
h=rod_d/2,$fs=0.5); // screw head
|
||||
if(screw_nut_d>0)
|
||||
scale([1,1,screw_reversed?1:-1])
|
||||
translate([0,0,gap/2+screw_shoulder_th])
|
||||
rotate([0,0,30])
|
||||
cylinder(
|
||||
r1=screw_nut_d/2,
|
||||
r2=1.5*screw_nut_d/2,
|
||||
h=rod_d/2,$fn=6); // screw nut
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
module gopro_extended(len, th=3)
|
||||
{
|
||||
linlen= len - 2*gopro_connector_y;
|
||||
if(linlen>0)
|
||||
{
|
||||
translate([0,gopro_connector_y,0])
|
||||
{
|
||||
rotate([90,0,0])
|
||||
translate([0,0,-linlen/2])
|
||||
linear_extrude(height = linlen, center = true, convexity = 10)
|
||||
{
|
||||
for(r=[45:90:360]) rotate([0,0,r])
|
||||
hull()
|
||||
{
|
||||
// corners
|
||||
translate([sqrt(2)*(gopro_connector_x/2-th/2),0,0])
|
||||
{
|
||||
intersection()
|
||||
{
|
||||
rotate([0,0,45]) square([th,th],center=true);
|
||||
circle(r=1.2*th/2,$fs=0.5);
|
||||
}
|
||||
}
|
||||
circle(r=th/2);
|
||||
}
|
||||
// Internal roundness
|
||||
difference()
|
||||
{
|
||||
square([th*2,th*2],center=true);
|
||||
for(r=[0:90:360]) rotate([0,0,r])
|
||||
translate([0,th*sqrt(2)]) circle(r=th/2,$fs=0.5);
|
||||
}
|
||||
}
|
||||
translate([0,linlen+gopro_connector_y,0])
|
||||
child(0);
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
58
case/openscad/libRoundedcube.scad
Normal file
58
case/openscad/libRoundedcube.scad
Normal file
|
|
@ -0,0 +1,58 @@
|
|||
module roundedcube(size = [1, 1, 1], center = false, radius = 0.5, apply_to = "all") {
|
||||
// If single value, convert to [x, y, z] vector
|
||||
size = (size[0] == undef) ? [size, size, size] : size;
|
||||
|
||||
translate_min = radius;
|
||||
translate_xmax = size[0] - radius;
|
||||
translate_ymax = size[1] - radius;
|
||||
translate_zmax = size[2] - radius;
|
||||
|
||||
diameter = radius * 2;
|
||||
|
||||
module build_point(type = "sphere", rotate = [0, 0, 0]) {
|
||||
if (type == "sphere") {
|
||||
sphere(r = radius);
|
||||
} else if (type == "cylinder") {
|
||||
rotate(a = rotate)
|
||||
cylinder(h = diameter, r = radius, center = true);
|
||||
}
|
||||
}
|
||||
|
||||
obj_translate = (center == false) ?
|
||||
[0, 0, 0] : [
|
||||
-(size[0] / 2),
|
||||
-(size[1] / 2),
|
||||
-(size[2] / 2)
|
||||
];
|
||||
|
||||
translate(v = obj_translate) {
|
||||
hull() {
|
||||
for (translate_x = [translate_min, translate_xmax]) {
|
||||
x_at = (translate_x == translate_min) ? "min" : "max";
|
||||
for (translate_y = [translate_min, translate_ymax]) {
|
||||
y_at = (translate_y == translate_min) ? "min" : "max";
|
||||
for (translate_z = [translate_min, translate_zmax]) {
|
||||
z_at = (translate_z == translate_min) ? "min" : "max";
|
||||
|
||||
translate(v = [translate_x, translate_y, translate_z])
|
||||
if (
|
||||
(apply_to == "all") ||
|
||||
(apply_to == "xmin" && x_at == "min") || (apply_to == "xmax" && x_at == "max") ||
|
||||
(apply_to == "ymin" && y_at == "min") || (apply_to == "ymax" && y_at == "max") ||
|
||||
(apply_to == "zmin" && z_at == "min") || (apply_to == "zmax" && z_at == "max")
|
||||
) {
|
||||
build_point("sphere");
|
||||
} else {
|
||||
rotate =
|
||||
(apply_to == "xmin" || apply_to == "xmax" || apply_to == "x") ? [0, 90, 0] : (
|
||||
(apply_to == "ymin" || apply_to == "ymax" || apply_to == "y") ? [90, 90, 0] :
|
||||
[0, 0, 0]
|
||||
);
|
||||
build_point("cylinder", rotate);
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
BIN
case/pics/assembly_01.jpg
Normal file
BIN
case/pics/assembly_01.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 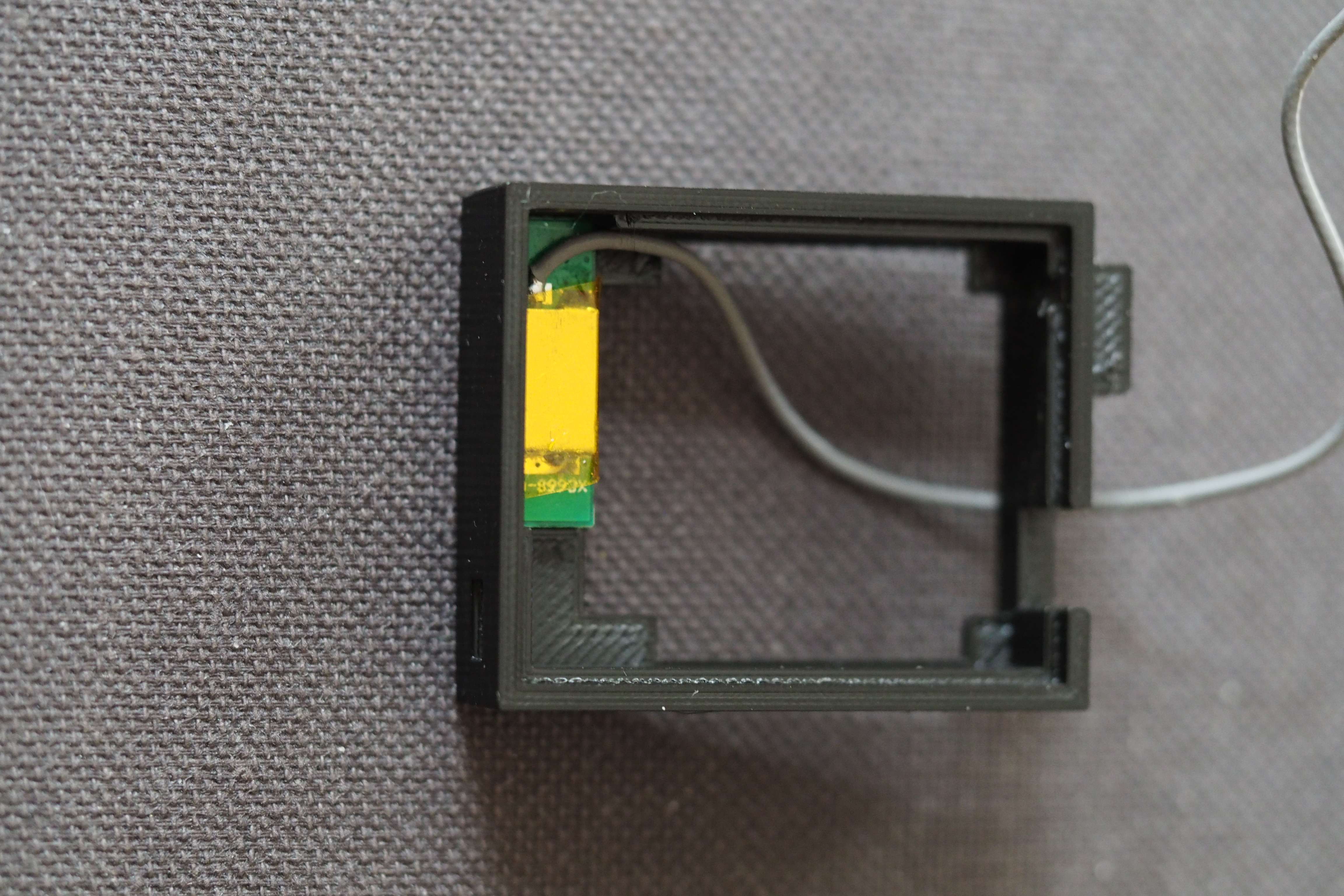
(image error) Size: 2.4 MiB |
BIN
case/pics/assembly_02.jpg
Normal file
BIN
case/pics/assembly_02.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 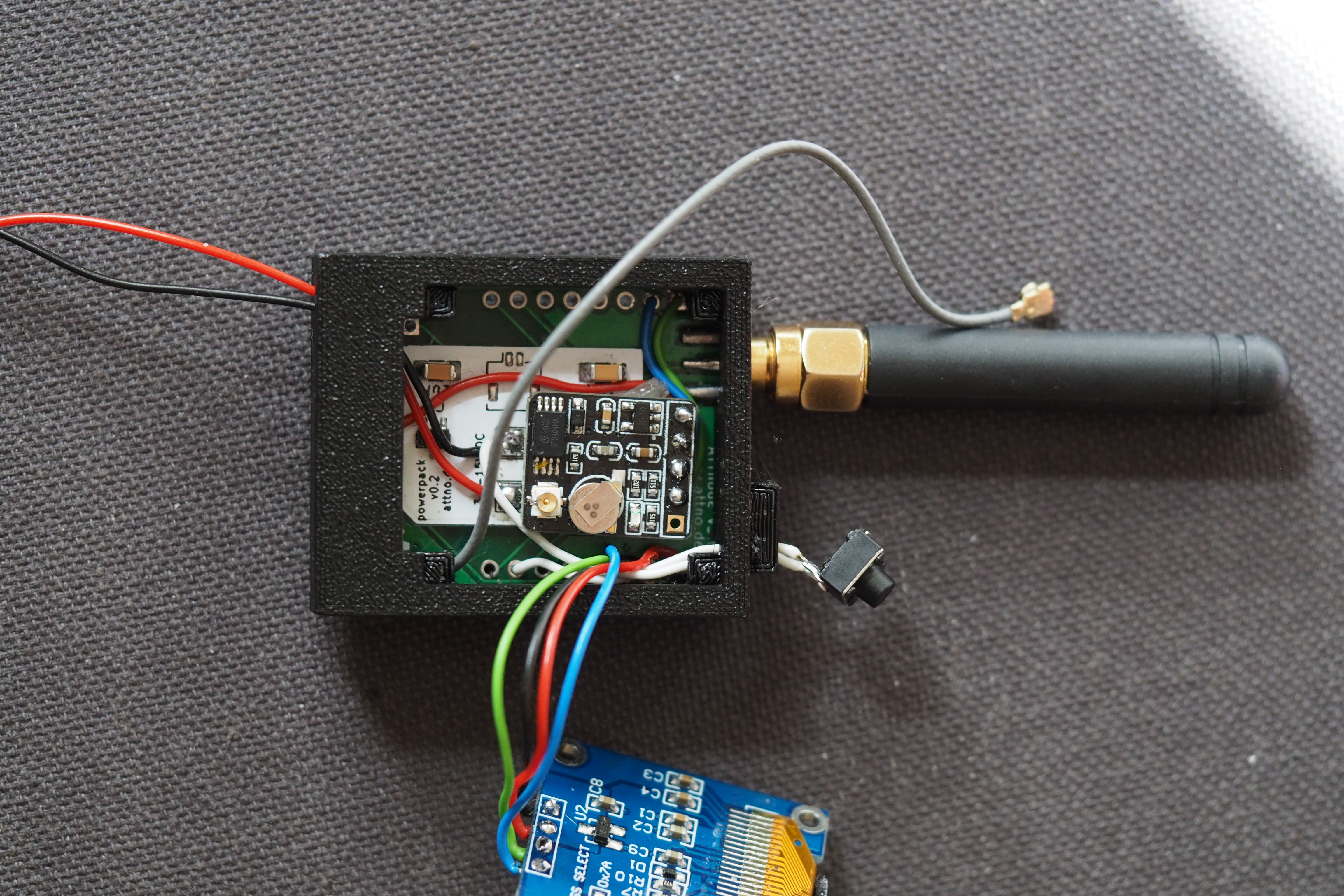
(image error) Size: 2.9 MiB |
BIN
case/pics/assembly_03.jpg
Normal file
BIN
case/pics/assembly_03.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 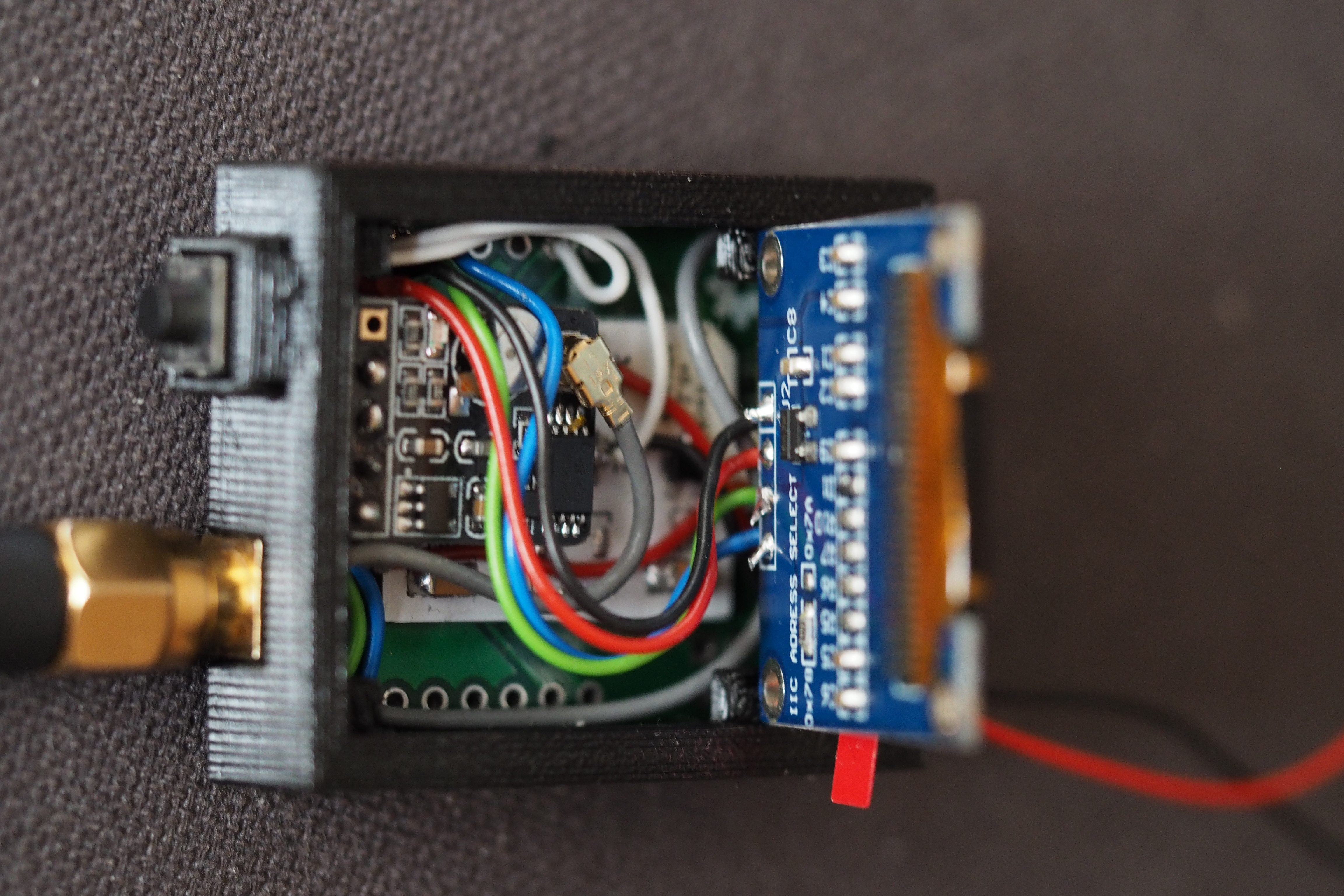
(image error) Size: 2.1 MiB |
BIN
case/pics/assembly_04.jpg
Normal file
BIN
case/pics/assembly_04.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 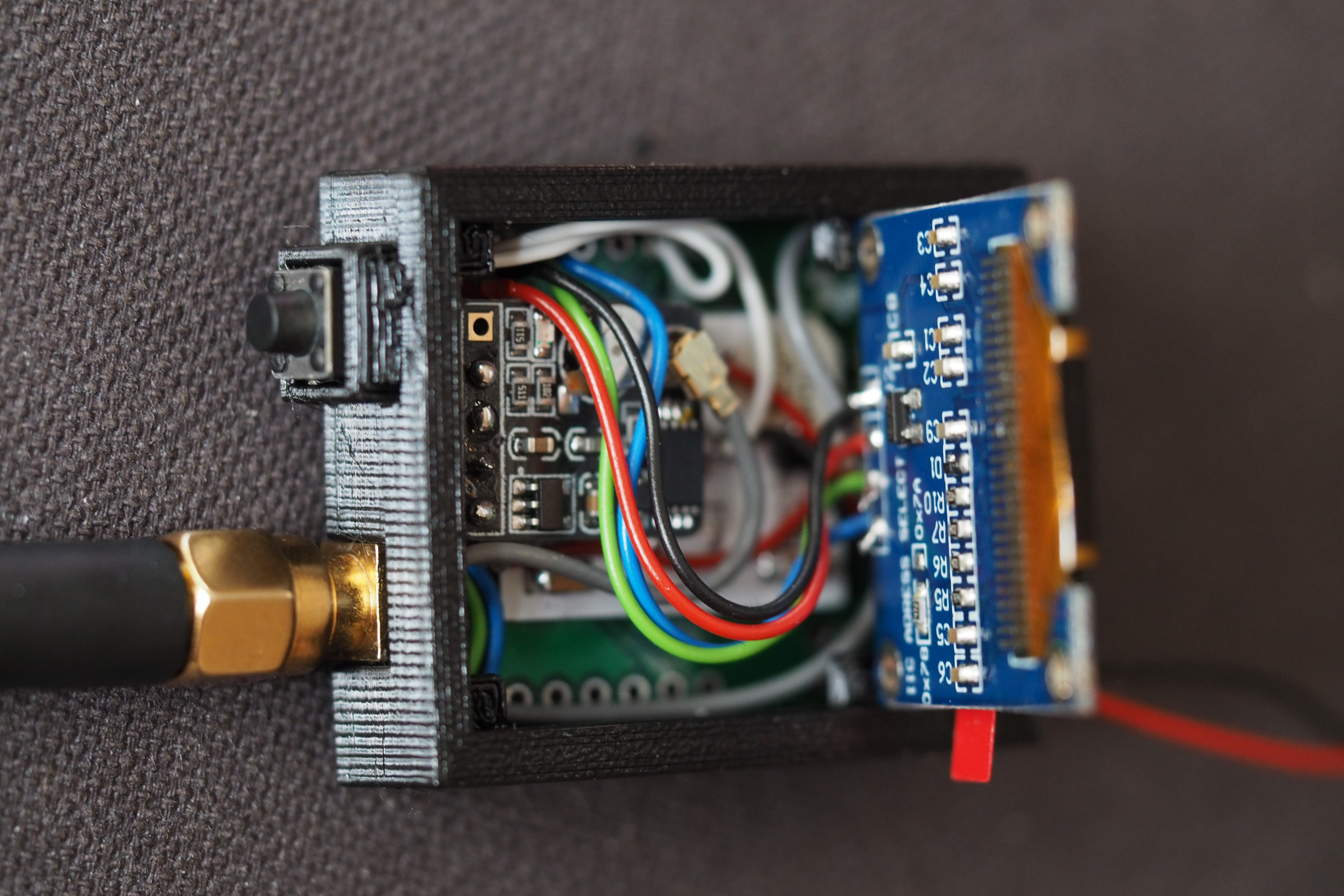
(image error) Size: 2.3 MiB |
BIN
case/pics/mapper_01.jpg
Normal file
BIN
case/pics/mapper_01.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 
(image error) Size: 2.5 MiB |
BIN
case/pics/mapper_02.jpg
Normal file
BIN
case/pics/mapper_02.jpg
Normal file
{kind=link}
Binary file not shown.
|
After 
(image error) Size: 2.7 MiB |
Loading…
Add table
Reference in a new issue